こんにちは.changです.
SuperCycleEnduro in 下総のソロ3hに出場しました. 1.5h程で先頭集団からドロップし,17位でした. 昨年末よりは上がって来たかな...?という感じです.

1. SuperCycleEnduro in 下総
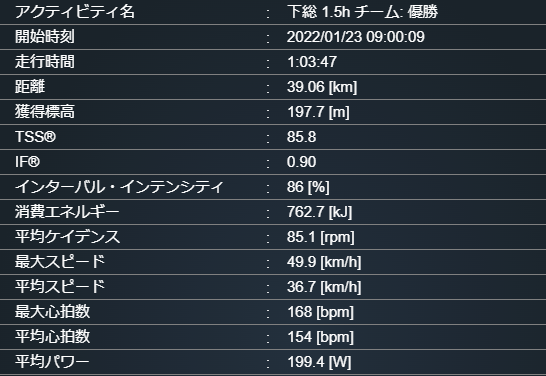
何度も出場しているイベントです. 1月には1.5hチームで優勝しました*1.
同じ会場(下総運動公園)で行われる別会社のレースもあります. 仲間内では,今回出たイベントを下総エンデューロ,別会社のイベントを下総クリテリウムと呼んでいます. 下総エンデューロは,下総クリテリウムに比べて小規模で,エントリーフィーがお安めです. その分サポートライダーがいなかったするのですが,,,良い意味で緩いというか,練習会な雰囲気のレースです. 今回は,本格的なシーズンインに向けてエントリーしました.
千葉のレースには有力チームが集まる印象を持っています. 先頭集団がE1やツールド沖縄のそれでもおかしく無い様なメンバーになる事もあります. 事前に発表されたスタートリストから,今回も有力選手が何名か参加される事が判っていました. 胸を借りるつもりで先頭に付いて行こうと思っていました.
2. レース展開
整列時にウッカリというか,タイミングも悪くて,スタートラインの左側に並んでしまいました. これ,追い抜き易い右側に並び,ローリング中に集団内での位置取りを整えるが正解です. 仕方がないので,1週目は1番手で走り,後ろからリアルスタートを切ってきたライダーに反応する仕方でレースインしました.

通例ですが,セレクションのかかるレース前半は速かったです. 平均速度が45 km/h近い周回もありました. 脚を使いながらついて行きます.
集団の前方に位置取っていたので,前方で起きる加速が見えていました. 「緑ジャージがペース上げたな」という感じで,素早く加速に反応できました. レースに参加している感があって楽しかったです. 今まで出場した耐久レースではこれが出来ていなくて,一列棒状の集団の後方でひたすら苦しむことが多かったと思います.
インターバルには何とかついて行けたんですが,アタックが連続で掛かるとキツいです. 緑ジャージの方達が交代で加速をかけると,どうしても息が上がってしまいます. 腰痛が辛かった所為もあって,1.5hでドロップしました.
ドロップした後は,脚を止めてゆっくり走りました. 一人で走っても意味が無いと割り切ったからです. 追いついて来た集団に2回飛び乗りました. フィニッシュにも集団で入りました.
レース後半の先頭集団はペースが落ち着いていて,比較的楽に付いて行けました. 流石に,皆さん疲弊されていたのだと思います. 印象的だったのが,緑ジャージがチームメート同士で接触しそうになり,有名選手が怒っていたシーンです. この人達も人間だなぁ...と.
前でゴールされた方達との力の差は勿論あります. でも,1.5h分の差がある訳では無いと感じました. ペースアップに対してあと数分粘れれば,最後まで残れたと思っています.
3. パワー分析
サイコンのログです. (先頭集団でゴールした)昨年の富士チャレ*2と比べると,平均パワーもNPも上がっています. TSSも比較的高めでした. 高強度への対応が良くなったのだと思います.

ラップデータを見ると,77周でした. 公式リザルトとも一致しています. おそらく,42~47と62~70の15週を単独で走ったと思います.

4. メモ
今回ポイントになったと感じた要素について,記録しておきます.
(1) 短時間高強度
昨年末の反省から,この冬はロングライドを止めて高強度のワークアウトとチーム練習(での削り合い?)に集中しました. 距離を走っていない不安はありましたが,やってきた事は間違いでは無かったと思います.
相変わらず高強度インターバルが嫌いなので,気持ちを維持する工夫をしながらやって来ました. 根が真面目(?)なのでコンプリートに拘りがち(=TSS重視)なのですが,無理ゲーなメニューを行けるところまで行くやり方も楽しいかもです.

1分間もがきの様なトレーニングは敬遠してきたんですが,やってみると以外にテンションが上がるし,効果も高いと感じます.

ロングの疲れが無いぶん,チーム練習に集中できたのが大きかったです. 昨年は一人で150~200 km走った翌日にチーム練に行って千切れたりしていたのですが,間違っていたかも知れません. 速いライダーと競い合うのが一番良いトレーニングですね. 何より楽しい! チームメートに感謝しています.
チーム練習は70 km前後と比較的短めですし,カフェに寄る時間等も大切にしたいです. 「練習がキツくなった」という声も聞きます. 短時間インターバルをチーム練で,休憩無しのベーストレーニングをローラーでと,目的を絞ってメリハリを付けるのが良さそうです.
(2) エアロポジション
パワーの上げ幅には限界があると考え,この冬から重点的に取り組んでいます. サドルを約20 mm前に出して,深い前傾姿勢を取れるようにしました. ローラーをやるときにも出来るだけ下ハンを持つようにしています. ヘルメットに貼るエアロシェル(上の写真に写っている)もこの冬から導入しました.
効果を実感していますが,下述の腰痛の原因にもなる様なのでバランスは必要です.
(3) 腰痛
今回も序盤から苦しみました. 昨年の様に半身が痛い訳では無いので,体のバランスが崩れているのでは無いと思います. 単純に,高強度に身体が慣れていないのでしょう.
長期的には練習で身体を慣らすしか無いですが,即効性を期待した対策も考えています. 先ず,タイヤを28 mmにしてみようと思っています. バイクが重くなるので敬遠してましたが,レースでも太めのタイヤを履いている方が多いと感じました. 平坦レースでの決戦用と割り切ります.
また,前乗りに替えたことでハンドルが近くなり,上半身を脱力しにくくなった印象を持っています. 100 mmのステムを今は使っていますが,110 mm或いは120 mmに替えても良さそうです. Izalcoの新型ステムの販売が早く始まって欲しい...
(4) 先頭交代
レース内での先頭交代が下手だと気付きました. 当然ですが,チーム練習での先頭交代とは違います. ローテするライダーの力を知らないと言うか,多くの場合,自分よりも圧倒的にパワーが高いライダーと回る事になります. 十分な余裕を残して交代する必要があります.
周りのライダーさん,特に強い方は,必ずしも僕が引く事を望んでいないと感じました. 実際,「回れないなら下がって」と言われました. パワーが及ばない人間が引いても集団のペースが落ちるだけで,誰にもプラスになりません. 前に出るとテンションが上がって楽しいですが,集団内での自信を俯瞰する冷静さが大切ですね.
レース後,元プロ選手のスタッフさんから「練習では出し切る.レースでは自分に有利になる様に走る」とアドバイスを受けました. 真理です.
(5) 補給
レース前半が忙しくて,なかなか補給食を摂れませんでした. 速度に対して余裕が無く,手を離すのが怖いからです. 力の無いライダーから削られるという事です.
今回,2本目のボトルをMag Onを溶かした高カロリー仕様にしていました. 次回からは,1本目を高カロリーにして前半から積極的に摂取することにします.
5. 結び
レースは楽しいです.
スイッチ入ったので,4/2の袖ヶ浦160 kmにもエントリーしました. これを経由して,4/17の富士チャレ200 kmに臨みます.